Mesure de force de lancement de drone
.
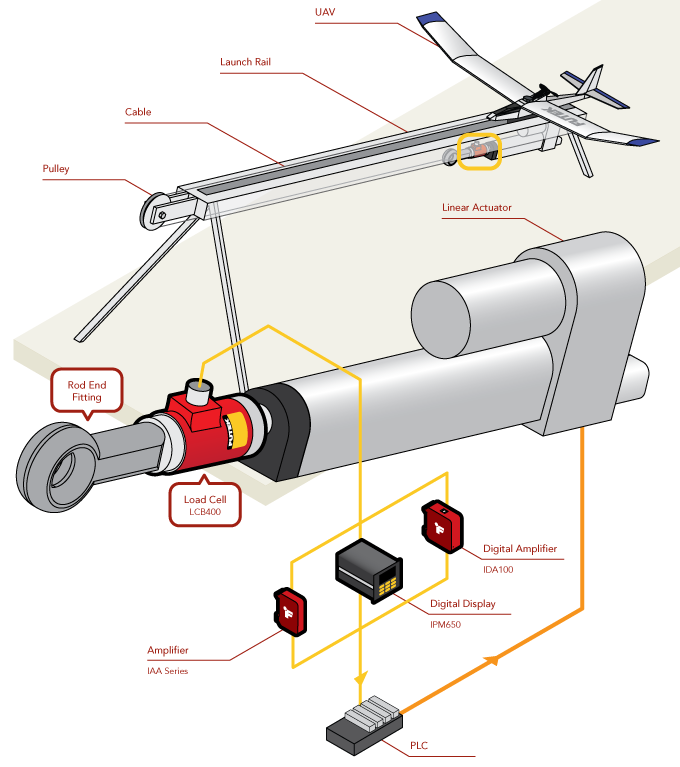
Les véhicules aériens sans pilote (UAV) sont dotés de diverses capacités de lancement, telles que le lancement manuel, le décollage vertical ou le décollage sur piste. Avec l'essor de drones toujours plus performants et puissants, certains véhicules nécessitent des lanceurs pour les propulser dans les airs. Ces lanceurs doivent appliquer une quantité minimale de force pour lancer l'aéronef dans les airs en toute sécurité. Pour ce faire, un capteur de force à embout LCB400 est accouplé au mécanisme de lancement pour mesurer la force appliquée au drone.
.
Fonctionnement :
- Un capteur de force de la série LCB400 est monté à l'extrémité d'un actionneur linéaire.
- L'autre extrémité du capteur est attachée au câble qui va lancer le drone.
- Le piston de l'actionneur est alors rapidement rétracté, tirant le câble qui lancera le drone.
- Le LCB400 mesure la force appliquée au câble par l'actionneur.
- La mesure du LCB400 est envoyée à l'afficheur numérique (IHH500, IPM650) ou est affiché sur un PC avec le logiciel SENSIT (IDA100).
- Un signal analogique amplifié est ensuite envoyé au PLC commandant le lanceur et permettant le contrôle de la force.
- De plus, le logiciel SENSIT peut être utilisé pour enregistrer la sortie du capteur sur IPM650 et IDA100.
Produits associés
SM18-GAGE : Amplificateur conditionneur pour capteurs à jauge de contrainte

IHH505 : Indicateur numérique data logger portatif avec sortie USB

SENSIT : Logiciel d'acquisition des données FUTEK

IPM650 : Indicateur numérique pour capteur sortie USB

PAXS : Afficheur pour capteur a jauge de contrainte

Solution FUTEK USB220 pour capteur de force, couple, pression (entrée mV/V)

LCB400 : Capteur de force en traction compression - +/-1000 Lb ... 10000 Lb (de 4500 N à 44 KN)

Solution FUTEK USB320 pour capteur à sortie amplifiée courant ou tension

Solution FUTEK USB520 pour capteur de couple avec codeur incorporé - mesure de couple et angle / vitesse

LCB200 : Capteur de force en traction compression - De 1000 Lb à 3000 Lb (de 4 KN à 13 KN)

IAA100 : Amplificateur conditionneur sortie tension pour capteur à jauge de contrainte.

IAA200 : Amplificateur Conditionneur sortie courant pour capteur à jauge de contrainte.

LCB500 : Capteur de Force en Traction Compression - De +/- 100 Lb à +/- 5000 Lb (de 400 N à 20 KN)

IAA300 : Amplificateur pour capteur à jauge - Sortie tension - Haute vitesse et résolution .
