Systèmes de vol Fly By Wire (FBW)
.
Qu'est-ce qu'un système Fly-by-Wire (FbW) ?
Le système Fly-by-Wire est un système de commande de vol automatisé qui traite les commandes entrées par le pilote ou le pilote automatique et envoie les commandes correspondantes aux actionneurs des commandes de vol. Ce dispositif électronique automatisé remplace les systèmes de commande de vol mécaniques et hydrauliques traditionnels (leviers, tiges, câbles et poulies) permettant au pilote de commander à distance les surfaces de contrôle.
L'ordinateur de contrôle de vol (FCC) de l'avion surveille les capteurs dans tout l'avion pour effectuer des ajustements automatiques dans les dispositifs d'actionnement des surfaces de contrôle de vol afin d'améliorer la sécurité et les performances du vol, sur la base des lois de contrôle de vol. Le FbW est essentiellement un système de contrôle automatisé en boucle fermée se basant sur les éléments suivants :
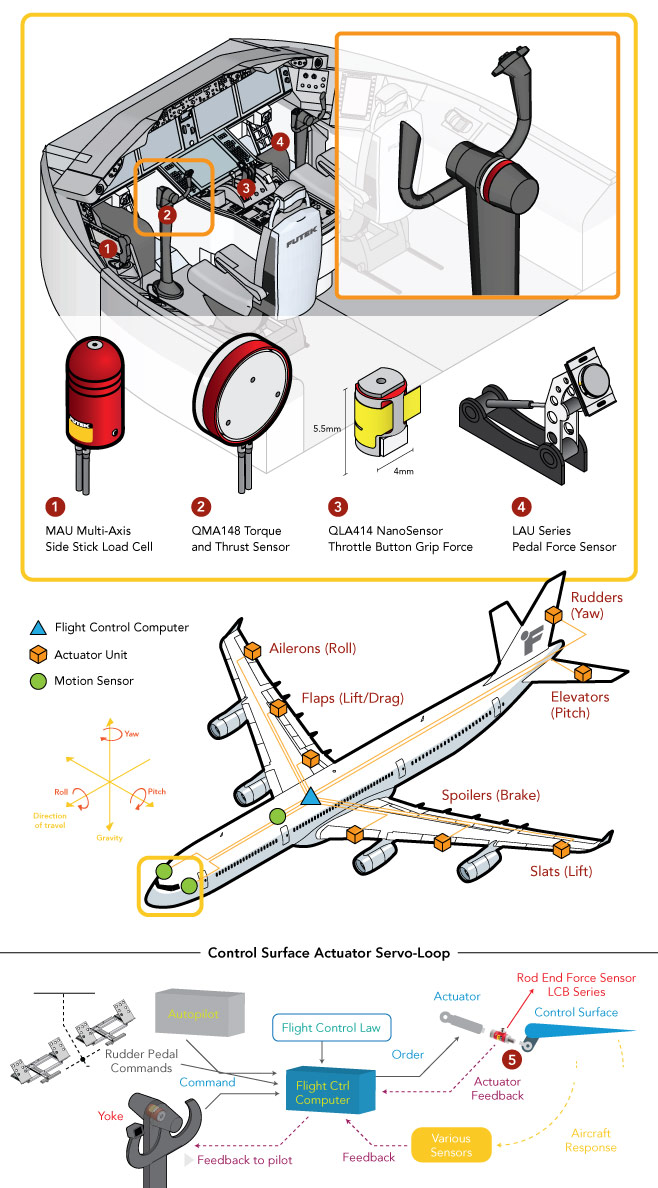
- L'entrée de référence fournie par le pilote automatique ou le pilote par le biais du manche, du manche latéral, des pédales ou de tout autre élément d'actionnement ;
- Le calculateur de contrôle de vol (FCC), qui calcule de combien les variables aérodynamiques actuelles de l'avion s'écartent de l'entrée de référence et quelle action doit être commandée aux actionneurs pour manœuvrer l'avion en toute sécurité selon les lois de contrôle de vol ;
- Les actionneurs de commande de surface, qui traduisent la commande du signal FCC en force/couple hydromécanique pour modifier la position/angle des commandes de surface (gouvernail de direction, gouvernails de profondeur, becs de bord d'attaque, spoilers, volets et ailerons). Ils sont directement responsables de la modification de l'axe principal de rotation de l'aéronef (roulis, tangage et lacet) ;
- Les instruments ou les capteurs de l'aéronef, qui fournissent le retour de réponse au FCC pour le comparer à l'entrée de référence et à l'estimation.
Comment les capteurs de force sont-ils utilisés dans les systèmes FBW ?
Les capteurs de force et de couple multi-axes sont très fréquemment utilisés dans l'environnement des essais en vol pour valider la conception du système de contrôle basée sur les lois de contrôle du vol. Les cellules de charge et les capteurs multi-axes sont ajoutés au système de commande pendant la phase de vérification et de validation pour vérifier et calibrer les paramètres des boucles de commande de vol électriques. Les commandes de vol doivent être validées pendant la phase de conception du produit et nécessitent une vérification extrême avant l'utilisation en vol.
.
Comment ça marche ?
- Levier latéral : Pendant la phase de validation du produit, le capteur de charge de changement de vitesse MAU300 fournit aux ingénieurs chargés de l'assurance qualité et des commandes de vol les outils appropriés pour mesurer la force appliquée aux commandes de vol à levier latéral. Pour s'assurer que ce mécanisme fonctionne correctement, le capteur MAU300 Multi-Axis Gear Shift Load Cell de FUTEK peut être installé dans l'arbre de chaque manche latéral de commande de vol.
- Manche : Les pilotes comptent beaucoup sur le manche pour guider le tangage et le roulis d'un avion. En pivotant le manche, le pilote effectue des manœuvres sur l'axe de roulis. En avançant et en reculant le manche, le pilote peut régler l'élévation et l'axe de tangage. Pour s'assurer que le manche fonctionne correctement, les ingénieurs en assurance qualité et en commandes de vol peuvent installer le capteur biaxial de couple et de poussée MBA500 de FUTEK pour mesurer les forces et les couples appliqués à la commande de vol du manche. Le capteur de force multi-axes MBA500 effectue des mesures dans les axes Mz (le roulis) et Fz (le tangage).
- Poignée de l'accélérateur : Le nanocapteur QLA414 ou le capteur de force à pincement LMD300 peut être utilisé dans les boutons d'actionnement de la poignée des gaz pour mesurer la force de pincement ou de pression exercée par le pilote.
- Pédales : Les pédales contrôlent la surface de commande de la gouverne de direction, qui peut se déplacer vers la gauche et la droite en poussant la pédale de pilotage de la gouverne de direction correspondante. L'utilisation de capteurs de force de pédale LAU220 permet aux ingénieurs de vérifier la précision de ces commandes. En utilisant les capteurs de force de pédale LAU de FUTEK, les ingénieurs d'assurance qualité peuvent mesurer la force nécessaire pour actionner chaque commande de vol de la pédale de direction.
- Actionneur des commandes de surface : Pendant la validation de la conception du produit, l'ingénieur de contrôle doit mesurer la force d'actionnement appliquée à la surface de contrôle. Cela permet de s'assurer que la force nécessaire est exercée et que la boucle de commande est correctement calibrée et fonctionnera comme prévu. Le capteur à tige LCB est installé entre l'actionneur et la surface de contrôle du vol pour mesurer la force d'actionnement réelle exercée et calibrer correctement la boucle d'asservissement de l'actionneur grâce à un retour d'effort supplémentaire.
.
.
Produits utilisés :
- Cellule de charge de changement de vitesse MAU300 ;
- MBA500 Capteur biaxial de couple et de poussée ;
- Nanocapteur QLA414 ;
- Capteur de force de pincement LMD300 ;
- Capteurs de force de pédale LAU220 ;
- Capteur de force d'embout de tige LCB400 ;
Tous ces capteurs peuvent être associés à l'amplificateur numérique USB220.
.
Produits associés
MAU300 : Capteur de force pour boite de vitesse

MBA500 : Capteur 2 axes force et couple

QLA414: Nano Capteur de force en traction compression

LMD300 : Capteur de force pour mesure de pincement

LAU220 : Capteur de force pour mesure sur pédale.

LCB400 : Capteur de force en traction compression - +/-1000 Lb ... 10000 Lb (de 4500 N à 44 KN)

Solution FUTEK USB220 pour capteur de force, couple, pression (entrée mV/V)
